[127] Parametric Design Optimization of a Tail Mechanism Based on Tri-Wheels for Curved Spoke-Based Stair-Climbing Robots
작성자 관리자
날짜 2024-01-08 15:58:18
조회수 417
J. Shin, Y. Kim, D. Y. Kim, G. H. Yoon, and T. Seo. International Journal of Precision Engineering and Manufacturing (2023): 1-16.
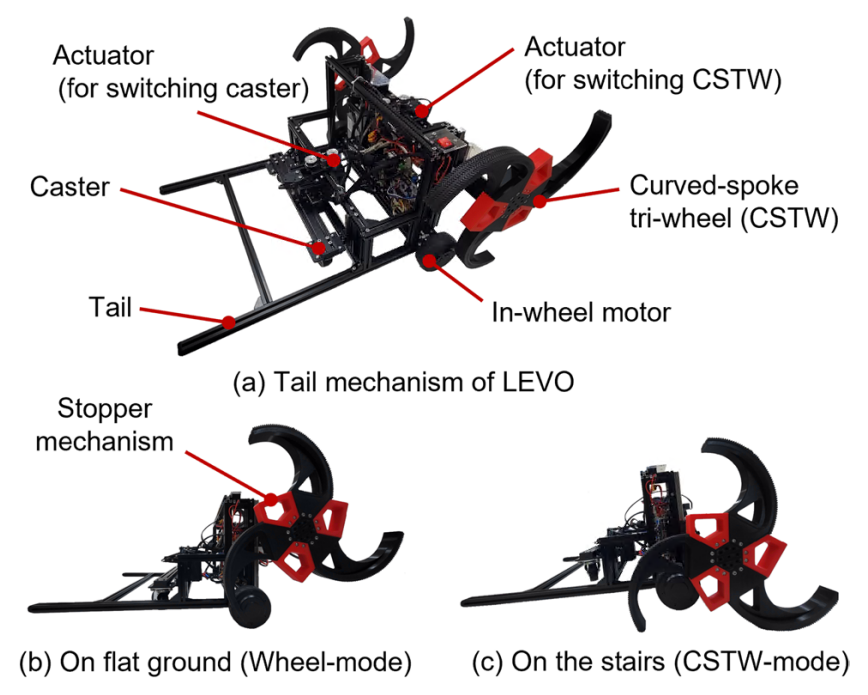
Overcoming stairs is an important requirement for mobile robots. Therefore, many studies have been conducted to develop robots with novel stair-climbing mechanisms. A curved-spoke-based stair-climbing robot has been developed to overcome stairs, but had some limitations during stair climbing, such as damage caused by friction with the edge of the stair and impact during locomotion. In a previous study, several tail mechanisms were suggested to solve these problems, and the tri-wheel tail mechanism showed remarkable performance improvements. However, the previous study used only one step size of 300 × 160 mm2. Therefore, in this study, a robust optimal design of the tri-wheel tail mechanism using the Taguchi method is conducted to achieve outstanding performance improvements even for stairs of various sizes and diferent climbing speeds as user conditions. The design of simulations of the tri-wheel tail mechanisms are performed via orthogonal arrays using a commercial dynamic simulation software tool. The objective function is to minimize the minimum required friction coeffcient for a mobile robot to climb stairs without slip. The performance improvements are verifed experimentally using a measurable performance index. Thus, these fndings can be used to design stair-climbing mobile robots.